La mano robotica
E’ di uno studente dell’Istituto di Istruzione Superiore Guglielmo Marconi di Latina un innovativo progetto presentato in occasione dell’Esame di Stato conclusivo del quinto anno. Il progetto, presentato dal diciannovenne Federico Morrone al termine del corso di studi in Telecomunicazioni, consiste in un prototipo di una mano robotica wireless in grado di analizzare ed imitare in tempo reale i movimenti della mano umana di un operatore. Come il termine wireless suggerisce, non vi è la necessità di alcun collegamento fisico cablato tra l’operatore ed il prototipo, dal momento che questo sfrutta un sistema radio per far comunicare i suoi due moduli: il guanto di comando (indossato dall’operatore) e la mano robotica vera e propria.
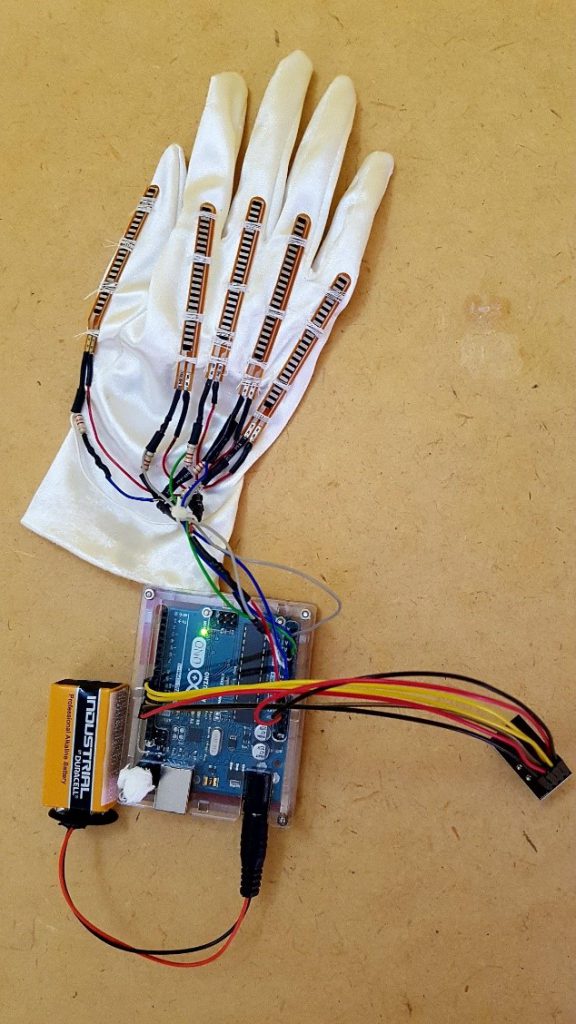
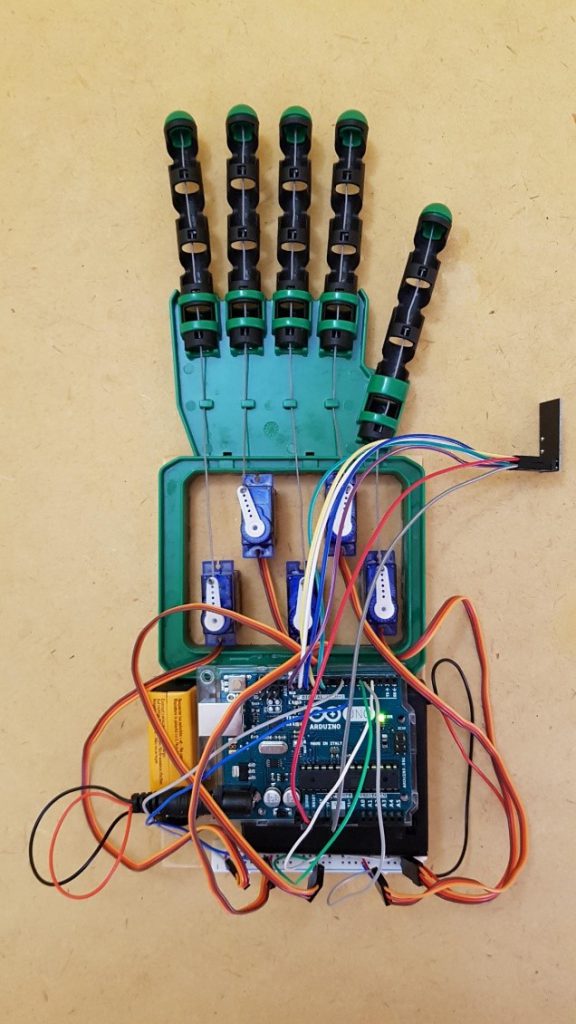
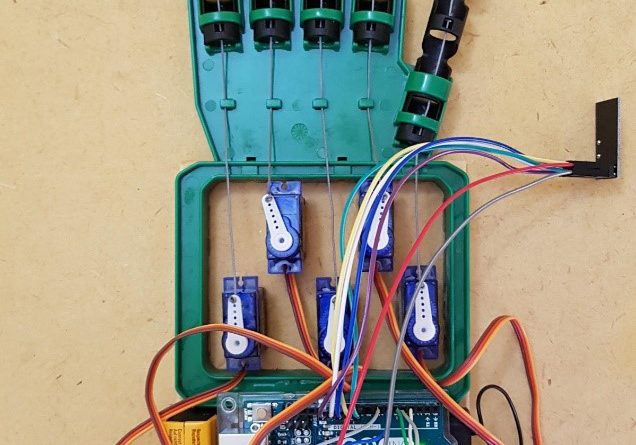
Alla base del funzionamento di entrambi i moduli vi sono due componenti Arduino UNO, schede elettroniche programmabili basate su microcontrollore che permettono di realizzare circuiti elettronici. La scheda montata sul modulo del guanto di comando è adibita all’analisi di cinque flex sensor, posti in corrispondenza delle dita dell’operatore. Si tratta di sensori di flessione che assumono la forma di una “barretta” flessibile in materiale plastico. All’interno di essa alloggia un resistore la cui resistenza elettrica varia in funzione della flessione che gli viene applicata. In altre parole, essi comunicano alla scheda UNO come l’operatore sta muovendo la mano. Tramite rice-trasmettitore radio nRF24L01, tali dati vengono inviati alla seconda scheda UNO presente sul modulo della mano robotica. Sulla base dei dati ricevuti, la seconda scheda provvede a pilotare opportunamente i cinque servomotori, che permetteranno agli arti artificiali di imitare i movimenti della mano dell’operatore. In particolare, nel prototipo sono stati impiegati cinque servomotori SG90 a rotazione di 180 gradi, prodotti dalla Tower ProTM.
L’idea del progetto nasce dalla particolare esigenza, propria di diversi ambiti, di operare interventi di precisione in situazioni di pericolo per l’uomo e altresì in situazioni in cui l’uomo è impossibilitato a venire direttamente a contatto con l’oggetto dell’intervento. Sebbene tale prototipo non possa rappresentare una soluzione definitiva al problema, rappresenta sicuramente un interessante modello dal quale partire.
Articolo a cura di Federico Morrone